
 Při spouštění elektromotoru je spotřeba proudu překročena 7krát, což přispívá k předčasnému selhání elektrických a mechanických částí motoru. Chcete-li tomu zabránit, použijte ovladač rychlosti motoru. Existuje mnoho modelů výrobního plánu, ale abyste si takové zařízení vyrobili sami, musíte znát princip elektromotoru a jak řídit rychlost rotoru.
Při spouštění elektromotoru je spotřeba proudu překročena 7krát, což přispívá k předčasnému selhání elektrických a mechanických částí motoru. Chcete-li tomu zabránit, použijte ovladač rychlosti motoru. Existuje mnoho modelů výrobního plánu, ale abyste si takové zařízení vyrobili sami, musíte znát princip elektromotoru a jak řídit rychlost rotoru.
Obecné informace
Střídavé elektrické motory jsou široce používány v mnoha oblastech lidského života, jmenovitě u modelů asynchronního typu. Hlavním účelem motoru jako elektrického stroje je přeměna elektrické energie na mechanickou energii . Asynchronní v překladu znamená nesouvislý, protože rychlost rotoru se liší od frekvence střídavého napětí (U) ve statoru. Podle typu výkonu existují dva typy asynchronních motorů:
- Jednofázová.
- Tři fáze.
Jednofázové se používají pro domácí potřeby domácností a třífázové se používají ve výrobě. U třífázových asynchronních motorů (dále jen TAD) se používají dva typy rotorů:
- uzavřeno;
- fáze.
Uzavřené obvody tvoří asi 95% všech použitých motorů a mají významný výkon (od 250 W a více). Fázový typ se strukturálně liší od krevního tlaku, ale ve srovnání s prvním se používá jen zřídka. Rotor je ocelová figurka válcového tvaru, která je umístěna uvnitř statoru a na její povrch je přitlačeno jádro.
Veverka klec a fázové rotory
Vysoce vodivá měď (pro stroje s vysokým výkonem) nebo hliníkové tyče (pro stroje s nižším výkonem) pájené nebo zapuštěné do povrchu jádra a zkratované z konců dvěma kroužky hrají roli elektromagnetů s póly směřujícími ke statoru. Navíjecí tyče nemají žádnou izolaci, protože napětí v takovém vinutí je nulové.
Častěji se používá pro tyče motorů ze středního výkonu hliníku se vyznačuje nízkou hustotou a vysokou elektrickou vodivostí.
Aby se snížily vyšší harmonické složky elektromotorické síly (EMF) a aby se vyloučilo pulzování magnetického pole, mají tyče rotoru určitým způsobem vypočítaný úhel sklonu vzhledem k ose otáčení. Pokud je použit elektrický motor s malým výkonem, pak jsou drážky uzavřené struktury, které oddělují rotor od mezery, aby se zvýšila indukční složka odporu.
Rotor ve formě fázového provedení nebo typu je charakterizován vinutím, jeho konce jsou spojeny ve formě "hvězdy" a připojeny ke kontaktním prstencům (na hřídeli), podél kterých se klouzají grafitové kartáčky. Pro odstranění vířivých proudů je povrch vinutí pokryt oxidovým filmem. Kromě toho je do obvodu vinutí rotoru přidán odpor, který vám umožňuje změnit odpor (R) obvodu rotoru, aby se snížily spínací proudy (Ip). Spínací proudy nepříznivě ovlivňují elektrické a mechanické části elektromotoru. Proměnné rezistory používané k řízení Ip:
- Kovový nebo schůdkový s ručním řazením.
- Kapalina (kvůli ponoření do hloubky elektrod).
Kartáče z grafitu se opotřebovávají a některé modely jsou vybaveny zkratovanou konstrukcí, která zvedá kartáče a uzavírá kroužky po nastartování motoru. HELLY s fázovým rotorem jsou flexibilnější, pokud jde o regulaci Ip.
Designové funkce
Indukční motor nemá na rozdíl od stejnosměrného motoru výrazné póly. Počet pólů je dán počtem cívek ve vinutích pevné části (statoru) a způsobem připojení. V asynchronním stroji se 4 cívkami prochází magnetický tok. Stator je vyroben z plechů ze speciální oceli (elektrická ocel), což redukuje vířivé proudy na nulu, při kterých dochází k významnému zahřívání vinutí. To vede k masivnímu interturn obvodu.

Železné nebo rotorové jádro je přitlačováno přímo na hřídel. Mezi rotorem a statorem je minimální vzduchová mezera. Rotorové vinutí je vyrobeno ve tvaru „veverkové klece“ a je vyrobeno z měděných nebo hliníkových tyčí.
U elektromotorů s výkonem do 100 kW se používá hliník, který má nízkou hustotu - pro nalití do drážek jádra rotoru. Ale i přes takové zařízení se motory tohoto typu zahřívají. K vyřešení tohoto problému se používají ventilátory pro nucené chlazení, které jsou namontovány na hřídeli. Tyto motory jsou jednoduché a spolehlivé. Motory však při spuštění spotřebovávají velký proud, což je 7násobek jmenovitého proudu. Z tohoto důvodu mají nízký točivý moment, protože většina energie elektřiny jde do ohřevu vinutí.
Elektromotory, které mají zvýšený točivý moment, se liší od běžné konstrukce asynchronního rotoru. Rotor je vyroben ve formě dvojité „veverkové klece“. Tyto modely jsou podobné fázovým typům výroby rotorů. Skládá se z vnitřních a vnějších „veverkových buněk“, přičemž vnější je počáteční a má velký aktivní a malý reaktivní R. Vnější má malý aktivní a vysoký reaktivní R. Když se rychlost zvyšuje, přepnu na vnitřní buňku a pracuje jako rotor veverkové klece.
Pracovní princip
Když proudím podél vinutí statoru, vytvoří se v každém z nich magnetický tok (Ф). Tyto f jsou vůči sobě posunuty o 120 stupňů. Získané f se otáčí a vytváří elektromotorickou sílu (EMF) v hliníkových nebo měděných vodičích. V důsledku toho se vytvoří počáteční magnetický moment elektrického motoru a rotor se začne otáčet. Tento proces je také nazýván v některých zdrojích skluzu (S), který ukazuje rozdíl ve frekvenci n1 elektromagnetického pole startéru, který se stává větší než frekvence získaná otáčením rotoru n2. Vypočítá se jako procento a má tvar: S = ((n1-n2) / n1) * 100%.
 Hodnota S při počátečním startu elektromotoru je přibližně 1, ale se zvyšujícími se hodnotami n2 se zmenšuje. V tomto okamžiku I v rotoru klesá, proto se EMF stává méně než jmenovitá hodnota. Při volnoběhu je S minimální, ale při zvýšení momentu statické interakce rotoru a statoru dosáhne tato hodnota kritickou hodnotu. Pokud platí následující nerovnost: S> Scr, pak motor pracuje normálně, avšak pokud je překročena hodnota Scr, může se „převrátit“. Převrácení způsobí nestabilní operaci, ale v průběhu času zmizí.
Hodnota S při počátečním startu elektromotoru je přibližně 1, ale se zvyšujícími se hodnotami n2 se zmenšuje. V tomto okamžiku I v rotoru klesá, proto se EMF stává méně než jmenovitá hodnota. Při volnoběhu je S minimální, ale při zvýšení momentu statické interakce rotoru a statoru dosáhne tato hodnota kritickou hodnotu. Pokud platí následující nerovnost: S> Scr, pak motor pracuje normálně, avšak pokud je překročena hodnota Scr, může se „převrátit“. Převrácení způsobí nestabilní operaci, ale v průběhu času zmizí.
Metody nastavení rychlosti
Aby se předešlo nepříznivým účinkům při rozběhu, je nutné snížit rychlost elektrického motoru 220 V nebo 380 V. Existuje několik způsobů, jak toho dosáhnout:
- Změna hodnoty R řetězu rotoru.
- Změňte U ve vinutí statoru.
- Změňte frekvenci U.
- Přepínání pólů.
Při změně hodnoty R části rotoru pomocí přídavných odporů snižuje rychlost, ale v důsledku toho klesá výkon. Proto je dosaženo významné ztráty elektřiny. Tento typ regulace by měl být aplikován na fázový rotor.
Při změně hodnot U na cívce statoru je možné mechanické nebo elektrické ovládání rychlosti rotoru. V tomto případě se používá regulátor U. Pomocí této metody je možné jej použít pouze s povahou ventilátoru zátěže (například regulace rychlosti ventilátoru 220v). Pro všechny ostatní případy se používají třífázové automatické transformátory, které vám umožňují plynule měnit hodnoty U nebo tyristorové regulátory.
Na základě vzorce závislosti rychlosti otáčení na frekvenci přívodu U je možné regulovat počet otáček rotoru. Frekvence rotujícího magnetického pole statoru se vypočítá podle vzorce: Nst = 60 * f / p (f je frekvence proudové napájecí sítě, p je počet párů pólů). Tento způsob poskytuje schopnost plynule řídit rychlost otáčení části rotoru. Pro dosažení vysoké účinnosti je nutné změnit frekvenci a U. Tato metoda je optimální pro motory s veverkovou klecí, protože ztráty energie jsou minimální. Počet párů pólů lze změnit dvěma způsoby:
- V statoru (v drážkách) musí být položena 2 vinutí s jiným číslem p.
- Vinutí se skládá ze dvou částí zapojených paralelně nebo sériově.
Hlavní nevýhodou této metody je zachování postupné povahy změny frekvence elektrického motoru veverkové klece.
Typy a kritéria výběru
Chcete-li vybrat regulátor, musíte se v určitém případě řídit určitými charakteristikami. Ze všech kritérií si můžete vybrat následující:
 Podle typu řízení. U motorů kolektorového typu se používají regulátory s vektorovým nebo skalárním řídicím systémem.
Podle typu řízení. U motorů kolektorového typu se používají regulátory s vektorovým nebo skalárním řídicím systémem.- Hlavním parametrem, na kterém musíte stavět, je Power.
- Rozsah U.
- Podle frekvenčního rozsahu. Musíte si vybrat model, který splňuje požadavky uživatele na konkrétní případ.
- Další vlastnosti, které zahrnují záruku, rozměry, vybavení.
Kromě toho je regulátor vybrán účinněji než samotný elektromotor podle vzorce: Preg = 1, 3 * Pmot (Preg, Pmot - výkon regulátoru a motoru). Musí být vybrán pro různé rozsahy U, protože všestrannost hraje důležitou roli.
Tyristorové zařízení
V tomto modelu, znázorněném ve schématu 1, se používají 2 tyristory, které jsou spojeny v opačném paralelním směru, i když je lze nahradit jedním triakem.
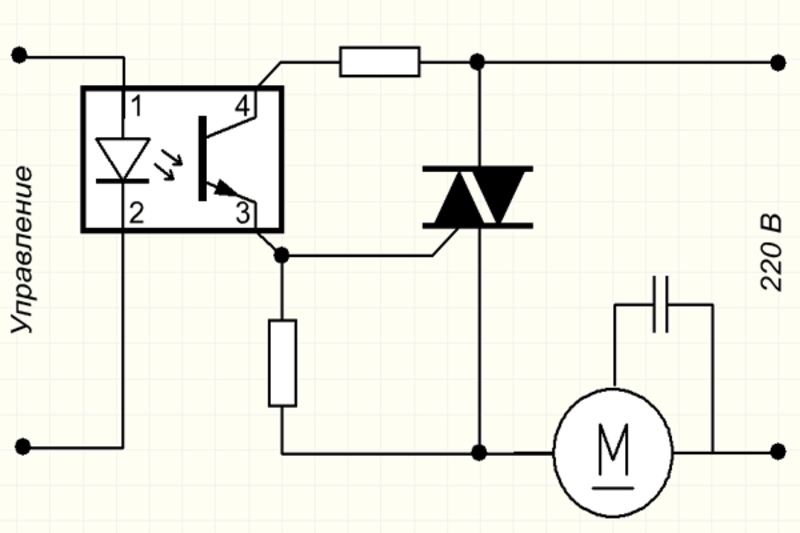
Schéma 1 - Řízení rychlosti tyristorového motoru kolektoru bez ztráty energie.
Tento obvod provádí regulaci otevřením nebo uzavřením tyristorů (triak) během fázového přechodu neutrálem. Pro správné řízení motoru kolektoru se používají následující způsoby úpravy obvodu 1:
- Instalace ochranných obvodů LRC sestávající z kondenzátorů, rezistorů a tlumivek.
- Přidání vstupní kapacity.
- Použití tyristorů nebo triaků, jejichž proud překračuje jmenovitou hodnotu proudu motoru v rozmezí 3, 8krát.
Tento typ regulátoru má výhody a nevýhody. První zahrnují nízkou cenu, nízkou hmotnost a velikost. Druhý by měl zahrnovat následující:
- aplikace pro motory s nízkým výkonem;
- hluk a trhání motoru;
- při použití obvodu na triacích udeří do motoru konstanta U.
Tento typ regulátoru je nainstalován ve ventilátorech, klimatizacích, pračkách a elektrických vrtačkách. Plní své funkce bez ohledu na nedostatky dokonale.
Typ tranzistoru
Jiným názvem pro regulátor typu tranzistoru je autotransformátor nebo PWM regulátor (obvod 2). Mění hodnotu U podle principu modulace šířky pulsu (PWM) pomocí výstupní fáze, která používá tranzistory jako IGBT.
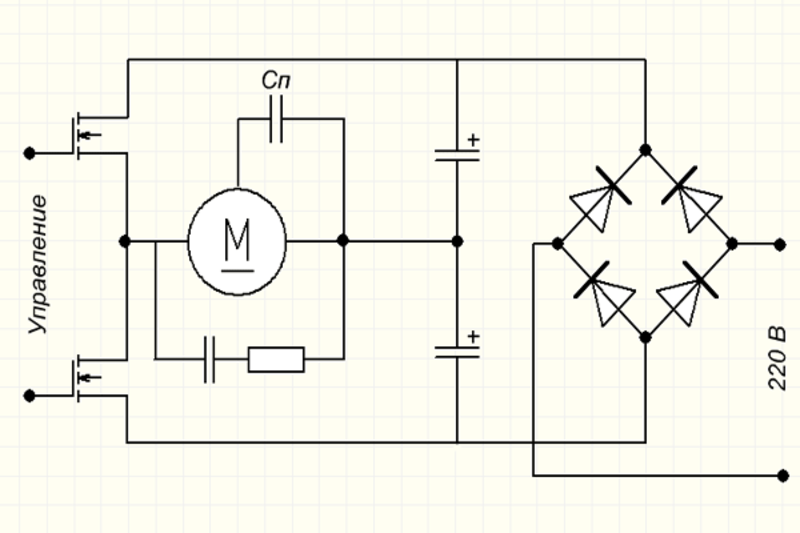
Schéma 2 - Regulátor rychlosti tranzistoru PWM.
Spínací tranzistory se vyskytují při vysoké frekvenci a díky tomu můžete změnit šířku impulsu. Proto se také změní hodnota U. Čím delší je puls a čím kratší pauza, tím vyšší je hodnota U a naopak. Pozitivní aspekty používání této odrůdy jsou následující:
- Nízká hmotnost při nízkých rozměrech.
- Docela nízké náklady.
- Při nízkých otáčkách žádný hluk.
- Ovládání díky nízkým hodnotám U (0, 12 V).
Hlavní nevýhodou aplikace je, že vzdálenost od elektromotoru by neměla být větší než 4 metry.
Řízení frekvence
 Široce se používá regulace rychlosti různých typů motorů v důsledku frekvence. Frekvenční konverze zaujímá vedoucí postavení na prodejním trhu zařízení pro regulaci rychlosti a implementaci měkkého startu. Díky své univerzálnosti je možné ovlivnit výkon, výkon a rychlost jakéhokoli zařízení s elektrickým motorem. Tato zařízení se používají pro jednofázové a třífázové motory. Používají se následující typy měničů kmitočtu:
Široce se používá regulace rychlosti různých typů motorů v důsledku frekvence. Frekvenční konverze zaujímá vedoucí postavení na prodejním trhu zařízení pro regulaci rychlosti a implementaci měkkého startu. Díky své univerzálnosti je možné ovlivnit výkon, výkon a rychlost jakéhokoli zařízení s elektrickým motorem. Tato zařízení se používají pro jednofázové a třífázové motory. Používají se následující typy měničů kmitočtu:
- Specializované jednofázové.
- Třífázový bez kondenzátoru.
K řízení rychlosti se používá kondenzátor, který je součástí vinutí jednofázového motoru (obvod 3). Tento měnič kmitočtu (IF) má kapacitní R, který závisí na frekvenci proudícího střídavého proudu. Výstupní stupeň takového střídače je vyroben na IGBT tranzistorech.
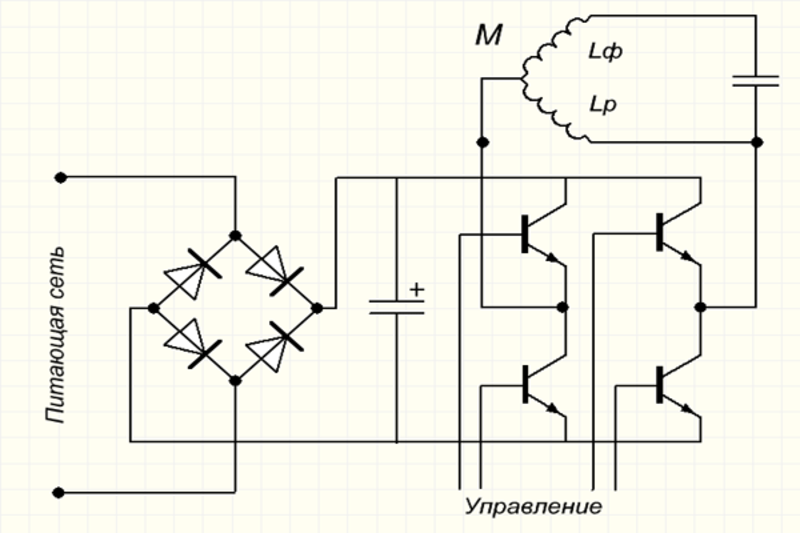
Schéma 3 - Frekvenční regulátor rychlosti.
Specializovaný střídač má své výhody a nevýhody. Výhody jsou následující:
- Řízení krevního tlaku bez zásahu člověka.
- Stabilita.
- Další funkce.
Je možné řídit provoz elektromotoru za určitých podmínek, jakož i ochranu před přetížením a zkratovými proudy. Kromě toho je možné rozšířit funkčnost připojením digitálních senzorů, sledováním provozních parametrů a použitím PID regulátoru. Nevýhody zahrnují omezení řízení frekvence a poměrně vysoké náklady.
Pro třífázové BP se používají také zařízení pro řízení frekvence (schéma 4). Regulátor má na výstupu tři fáze pro připojení elektromotoru.
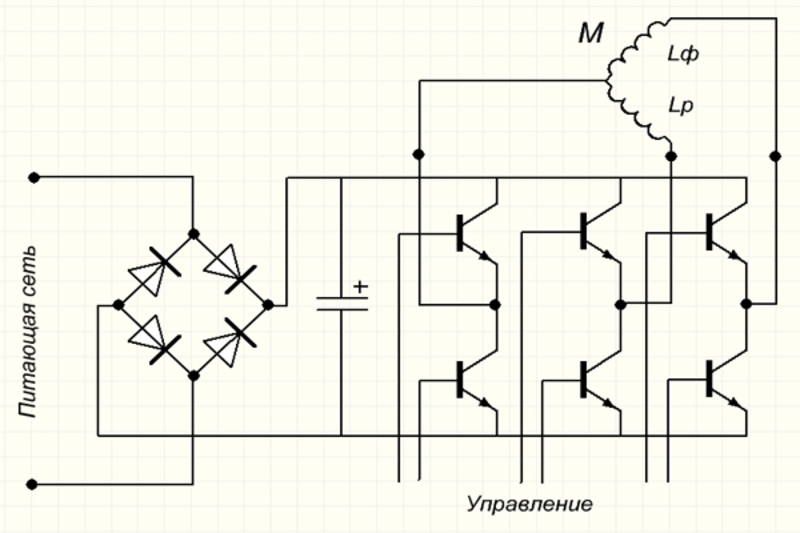
Schéma 4 - IF pro třífázový motor.
Tato varianta má také své silné a slabé stránky. První zahrnuje následující: nízké náklady, výběr výkonu, široký rozsah regulace frekvence, jakož i všechny výhody jednofázových frekvenčních měničů. Ze všech negativních stran lze rozlišovat hlavní: předvolba a zahřívání během uvedení do provozu.
Výroba pro kutily
Pokud neexistuje možnost, stejně jako touha po získání regulátoru typu továrny, můžete jej sestavit vlastníma rukama. Přestože se regulátory jako „tda1085“ osvědčily velmi dobře. Abyste toho dosáhli, musíte se seznámit s teorií a začít praktikovat. Schémata triackého designu jsou velmi oblíbená, zejména regulátor rychlosti asynchronního motoru 220v (schéma 5). Usnadněte si to. Chystá se na triak VT138, který se pro tyto účely hodí.
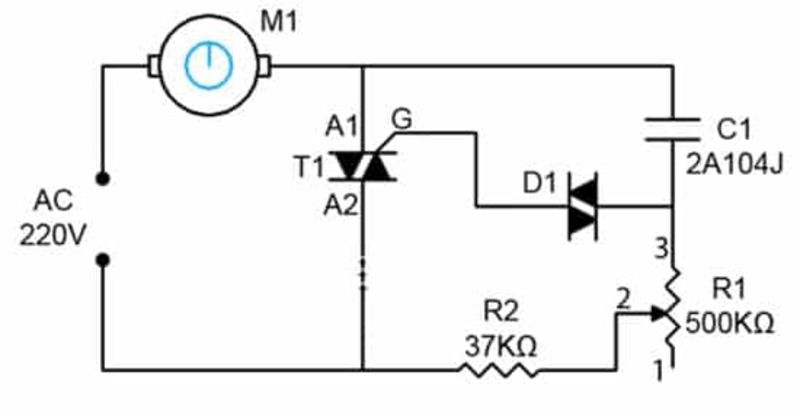
Schéma 5 - Jednoduchý regulátor rychlosti na triaku.
Tento regulátor lze také použít k nastavení rychlosti stejnosměrného motoru o 12 voltech, protože je poměrně jednoduchý a univerzální. Otáčky jsou regulovány změnou parametrů P1, která určuje fázi příchozího signálu, která otevírá triakální přechod.
Princip činnosti je jednoduchý. Po nastartování motoru se zpomalí, indukčnost se změní na menší stranu a přispěje ke zvýšení U v okruhu "R2-> P1-> C2". S výbojem C2 se triak na nějakou dobu otevře.
Existuje jiné schéma. Funguje to trochu jinak: poskytováním reverzního typu energie, která je optimálně rentabilní. Do obvodu je zahrnut poměrně silný tyristor.
Schéma 6 - Regulátor tyristorů zařízení.
Obvod se skládá z generátoru řídicího signálu, zesilovače, tyristoru a části obvodu, která působí jako stabilizátor pro rotaci rotoru.
Nejuniverzálnějším obvodem je regulátor triaku a dinistoru (obvod 7). Je schopen plynule snížit rychlost otáčení hřídele, nastavit zpětný motor (změnit směr otáčení) a snížit startovací proud.
Princip fungování obvodu:
- C1 je nabitá k U členění dinistoru D1 až R2.
- D1 při proražení otevírá přechod triaku D2, který je zodpovědný za řízení zátěže.
Zátěžové napětí je přímo úměrné frekvenční složce při otevření D2, v závislosti na R2. Obvod se používá ve vysavačích. Obsahuje univerzální elektronické ovládání a také možnost snadného připojení napájecího zdroje 380 V. Všechny podrobnosti by měly být umístěny na desce s plošnými spoji vyrobené technologií laser-železo (LUT). Podrobnosti o této technologii výroby desek plošných spojů lze nalézt na internetu.
Při výběru regulátoru otáček pro elektromotor je tedy možné koupit tovární nebo si jej vyrobit sami. Vytvoření domácího regulátoru je velmi jednoduché, protože pokud rozumíte principu zařízení, můžete jej snadno sestavit. Při instalaci součástí a při práci s elektřinou je třeba dodržovat bezpečnostní pravidla.