
- DPT zařízení
- Klasifikace motorů PT
- Vlastnosti činnosti ventilových motorů
- Vlastnosti střídavého zařízení
- Struktura krokového typu zařízení
- Princip fungování
Původ myšlenky stejnosměrného motoru (DCT) se objevil na počátku XIX. Století. Slavní fyzici Alessandro Volta, M. Faraday a P. Barlow uvedli svou vizi tohoto procesu do historie. B. S. Jacobi je považován za vynálezce elektromotoru, protože to byl ten, kdo dokázal vyrobit zařízení s rotační armaturou, které bylo možné uvést do praxe. Ačkoli prvním motorem byl nízký výkon, další už uvedl loď do pohybu.
 >
>
DPT zařízení
Hlavní části elektrického stejnosměrného stroje jsou magnety a vinutí. Pomocné části zahrnují skříň, jádro, hřídel, kolektor a kartáčový mechanismus. Všechny tyto podrobnosti mají svůj účel.
Jádra pohyblivých a pevných částí nejsou vyrobena z holistické struktury, ale z plechů z elektrické oceli. Tato strukturální funkce umožňuje prakticky eliminovat vířivé proudy.
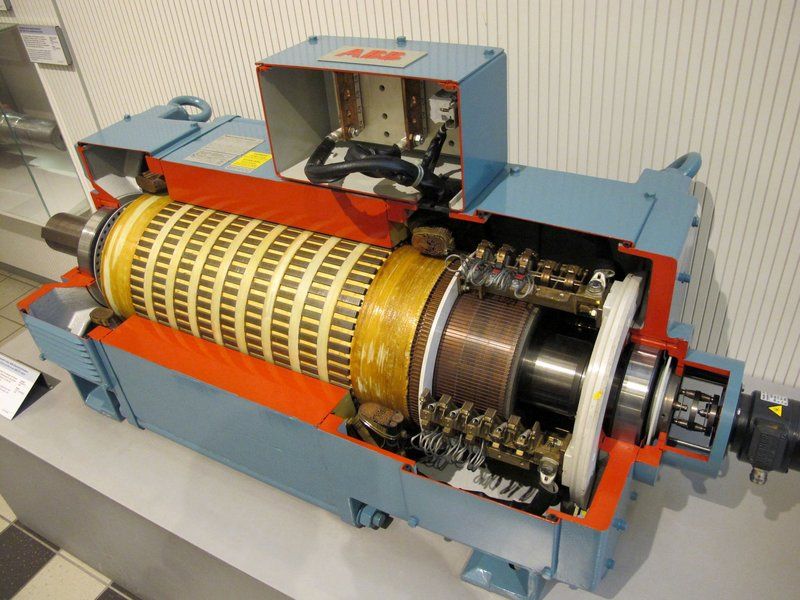
Přímou povinností kolektoru je přeměna střídavého proudu, který vzniká při vinutí kotvy, na konstantu. Kolektor je jednotka, která je specifická pro DC stroje. Je to však také nejzranitelnější, protože téměř polovina všech elektromotorů během provozu selže právě kvůli jeho poruchám. Absence kolektoru ve struktuře asynchronního nebo synchronního stroje zvyšuje jeho spolehlivost. Tato výhoda zůstává pro třífázové i jednofázové střídavé stroje.
Řízení stejnosměrného motoru znamená změnu rychlosti otáčení, protože jeho hlavním úkolem je uvést ovládací mechanismy do pohybu. Rychlost otáčení lze změnit třemi způsoby:
- změna dodávaného napětí;
- změna odporu v obvodu kotvy;
- změna magnetického toku v budícím obvodu.
Klasifikace motorů PT
Rozdíly mezi typy elektrických motorů jsou v typu magnetů a způsobu buzení. Magnety mohou být buď permanentní, nebo elektromagnetické. Výhody permanentního magnetu (na rozdíl od elektromagnetu):
- kompaktnost;
- Pro provoz nevyžaduje zdroj energie.
Nevýhodami jsou neschopnost upravit sílu magnetického toku a demagnetizaci v průběhu času.
Typ buzení DCB závisí na místě připojení vinutí pólu. V tomto ohledu rozlišují mezi nezávislým buzením motoru (budicí vinutí je poháněno cizím zdrojem) a samočinným buzením (budicí vinutí je spojeno s vinutím kotvy). Self-vzrušený motory mají kratší jména:
- zkrat (paralelní spojení vinutí);
- sériové (sériové spojení vinutí);
- směs (smíšené spojení vinutí).
Elektromotory se používají v různých oblastech průmyslu a zemědělství i v domácích instalacích. Jejich rozmanitost je skvělá. Hlavní typy DPT:
- tradiční účel;
- zvláštní účel.
Vlastnosti činnosti ventilových motorů
Ventilové motory patří k elektrickým strojům pro zvláštní účely. Svému jménu vděčí za použití zařízení k usměrňování proudu v nich - ventilů. Výhody ventilových elektromotorů:
- široká změna rychlosti otáčení;
- vyšší účinnost díky sníženým magnetickým ztrátám díky nízkému magnetickému odporu;
- i při špičkovém zatížení je výkon docela dobrý.
Kromě výhod mají některé nevýhody. Jejich hodnota však není velká. Mezi hlavní patří:
- hlučnost
- řízení vyžaduje určitou kvalifikaci zaměstnanců;
- vysoká cena.
 Jejich použití se liší: ve výrobě ropy, v chemickém průmyslu a ve vrtných soupravách.
Jejich použití se liší: ve výrobě ropy, v chemickém průmyslu a ve vrtných soupravách.
Hlavním rozdílem mezi ventilem a konvenčním motorem je konstrukce. Ventil nemá některé obvyklé části konstrukce: kolektor a kartáčový mechanismus. Místo toho je nainstalován spínač (střídač), pomocí kterého je řízen motor ventilu. Střídač přijímá signál ze snímače polohy rotoru.
Senzory polohy rotoru mohou být transformátory nebo indukční bezkontaktní prvky. Nejběžnější jsou senzory Hallova efektu v elektromotorické oblasti. Takové zařízení sestává z malé desky z polovodičového materiálu. Na něm jsou připojeny kontakty, ke kterým jsou připojeny kabely, připojené ke zdroji energie. Výstupy výstupního signálu jsou také pájeny na odpovídající spoje desky. Požadavky na snímače polohy rotoru jsou:
- kompaktnost;
- minimální hodnota příkonu;
- vysoká multiplicita signálu, maximální i minimální;
- spolehlivý provoz za jakýchkoli podmínek prostředí.
 Spínač se provádí na polovodičích. Jeho úloha je podobná úloze jednotky kartáč-kolektor v konvenčních motorech a spočívá ve změně směru proudu. Kotevní vinutí je umístěno na jádru lože a permanentní magnet je umístěn na rotoru. Tato konstrukce eliminuje možnost klouzavého kontaktu s kotvou.
Spínač se provádí na polovodičích. Jeho úloha je podobná úloze jednotky kartáč-kolektor v konvenčních motorech a spočívá ve změně směru proudu. Kotevní vinutí je umístěno na jádru lože a permanentní magnet je umístěn na rotoru. Tato konstrukce eliminuje možnost klouzavého kontaktu s kotvou.
Motor ventilu má proud v sinusových fázích. Budení může být dvou typů:
- elektromagnetické;
- magnetoelektrický.
Při elektromagnetickém buzení je vinutí pole umístěno na pólech. Je připojena k síti pomocí kluzných kroužků umístěných na hřídeli rotoru. K vytvoření magnetického pole tedy dochází elektromagnetickými prostředky.
V případě magnetoelektrického buzení nebude v budícím obvodu nebo v kotevním obvodu žádný posuvný kontakt. Permanentní magnety budou působit jako póly. Tyto motory se nazývají kartáčové motory.
Vlastnosti střídavého zařízení
 Střídavý stejnosměrný motor (BDTT) se výrazně liší od motoru ventilu. Jeho proud ve fázích vypadá lichoběžníkově. BDTT je uspořádán jednodušeji: modulace šířky pulsu je nahrazena přepnutím 120 nebo 180 stupňů. Hlavními úkoly bezkomutátorového motoru je přesná poloha rotoru v požadovaném intervalu a vysoká rychlost otáčení.
Střídavý stejnosměrný motor (BDTT) se výrazně liší od motoru ventilu. Jeho proud ve fázích vypadá lichoběžníkově. BDTT je uspořádán jednodušeji: modulace šířky pulsu je nahrazena přepnutím 120 nebo 180 stupňů. Hlavními úkoly bezkomutátorového motoru je přesná poloha rotoru v požadovaném intervalu a vysoká rychlost otáčení.
Provedení může být dvou typů: s magnety na pohyblivé části (kotva) nebo nehybné (stator). Automatizační zařízení pro chlazení používají pohony s konstrukcí ukotvených magnetů. Jejich charakteristickou vlastností je rychlé dosažení vysoké rychlosti.
 V systémech zdravotnického vybavení je umísťování magnetů na stator běžné. Tyto mikromoje jsou nazývány motory s vysokým točivým momentem. Jejich rychlost otáčení není tak velká, ale kvůli nedostatku budicího vinutí a přítomnosti permanentních magnetů odvádějí dobrou práci při přetížení a zachovávají přesnost polohy v prostoru.
V systémech zdravotnického vybavení je umísťování magnetů na stator běžné. Tyto mikromoje jsou nazývány motory s vysokým točivým momentem. Jejich rychlost otáčení není tak velká, ale kvůli nedostatku budicího vinutí a přítomnosti permanentních magnetů odvádějí dobrou práci při přetížení a zachovávají přesnost polohy v prostoru.
Signál na vinutí takových elektrických strojů bude přicházet od řidiče, jehož úkolem je řídit točivý moment. Aby se kotva mohla otáčet pod určitým úhlem, je nutné k potřebnému vinutí přivést napětí. Hladkost rotace nelze udržet, ale lze dosáhnout vysoké rychlosti rotace.
Rozdíl mezi motorem kolektoru a bezkomutátorovým je jak konstrukcí, tak provozem. Sběrné motory nepotřebují ovladač, ale provoz střídavého motoru bez jeho účasti je nepřijatelný. Výhody bezkartáčových motorů:
- schopnost pracovat v podmínkách s různými charakteristikami prostředí;
- dlouhodobé používání;
- spolehlivost v práci.
 Nevýhodou jsou náklady. Je to docela vysoké kvůli přítomnosti polovodičového spínače, permanentního magnetu a citlivých prvků ve struktuře.
Nevýhodou jsou náklady. Je to docela vysoké kvůli přítomnosti polovodičového spínače, permanentního magnetu a citlivých prvků ve struktuře.
Sestavit ventil nebo DPT vlastníma rukama je nevděčný úkol. Materiály, složitost práce a čas strávený budou mnohem dražší než peníze vynaložené na nákup továrního motoru. Spolehlivost a bezpečnost však bude několikrát vyšší.
Výběr těchto elektrických strojů musí být proveden na základě charakteristik řidičů s kanály modulace šířky impulsu:
- maximální stres při dlouhodobém používání;
- maximální rychlost otáčení;
- přípustná proudová síla;
- aktuální frekvence (běžná zařízení 7-8 kHz, pokročilejší modely - 16-32 kHz).
 Hlavními odkazy v řízení bezkomutátorového motoru jsou polohové senzory. Signál z nich je přenášen do řídicí jednotky a v důsledku toho dochází k přepínání. Ovládání těchto zařízení bez senzorů je však možné. V tomto případě hraje úbytek napětí vinutí roli, která je v určitém okamžiku nefunkční.
Hlavními odkazy v řízení bezkomutátorového motoru jsou polohové senzory. Signál z nich je přenášen do řídicí jednotky a v důsledku toho dochází k přepínání. Ovládání těchto zařízení bez senzorů je však možné. V tomto případě hraje úbytek napětí vinutí roli, která je v určitém okamžiku nefunkční.
Podle počtu fází je mnoho motorů třífázových a pro jejich řízení je v zařízení zapotřebí další uzel - stejnosměrný usměrňovač v trojfázovém impulzu. Řízení třífázového střídavého stejnosměrného motoru také způsobuje určité potíže kvůli paralelnímu ovládání několika parametrů. Protože elektrické stroje zařízení jsou reverzibilní, lze bezkomutátorový motor připojit jako generátor.
Struktura krokového typu zařízení
Řada speciálních střídavých motorů pro zvláštní účely jsou krokové motory. Někdy se jim říká impuls. Vztahují se na synchronní elektrické motory pro zvláštní účely. Princip jejich činnosti spočívá v tom, že se na výstupu získají krokové kroky na základě napěťových pulzů na vstupu. Typy krokových motorů podle typu rotoru:
- nadšený;
- reaktivní.
Struktura zařízení s aktivním rotorem naznačuje přítomnost elektromagnetů nebo permanentních magnetů v něm. U motorů s proudovým rotorem nedochází k vinutí pole. Rotor je vyroben z měkkého magnetického materiálu.
Ovládací vinutí je umístěno na pevné části - statoru. Podle počtu fází to může být různé, ale nejčastější jsou třífázová vinutí.
Princip fungování
 Pokud krokový motor na statoru má dva páry pólů se dvěma ovládacími vinutími, pak bude jeho rotace záviset na dodávce napětí do řídicího vinutí. Když je signál aplikován na řídicí vinutí, které je umístěno na prvním páru, rotor se otočí a zaujme polohu podél své osy. Když se na vinutí druhého páru objeví signál, bude muset rotor zaujmout polohu mezi těmito póly.
Pokud krokový motor na statoru má dva páry pólů se dvěma ovládacími vinutími, pak bude jeho rotace záviset na dodávce napětí do řídicího vinutí. Když je signál aplikován na řídicí vinutí, které je umístěno na prvním páru, rotor se otočí a zaujme polohu podél své osy. Když se na vinutí druhého páru objeví signál, bude muset rotor zaujmout polohu mezi těmito póly.
Když je signál vypnut na vinutí prvního páru a zbývající signál na ovládacím vinutí druhého páru pólů, rotor se bude otáčet na své ose. Jak se tedy otáčí, zdá se, že podniká kroky, a proto nese takové jméno. Kroky motoru (úhel rotace rotoru) se dvěma páry pólů budou rovny 45 stupňům. Spínací systém bude čtyřdobý.
U systému spínání push-pull se stejným počtem párů pólů je nutné, aby signál vždy dorazil pouze k jednomu specifickému řídícímu vinutí určitého páru pólů. Pak se úhel rotace rotoru změní a bude 90 stupňů.
Princip fungování krokového motoru byl pochopitelný i pro figuríny, musíte věnovat pozornost schématu.

Rotor zaujme polohu v prostoru proti dvojici pólů, na jejichž vinutí bude dodána energie. Je-li do vinutí sousedních pólů dodávána dvě energie, rotor zaujme polohu mezi nimi. Čím menší je hodnota kroku motoru, tím přesnější a stabilnější je jeho provoz.
Krokový motor vyžaduje spínač. Jeho úkolem je přeměnit řídicí pulzy určité sekvence na pravoúhlé impulzy v systému s požadovaným počtem fází.
Při silném zatížení motoru bude snížena přesnost rotace rotoru. Bude se točit s určitým zpožděním, což je úhel statické chyby. Když je krokový motor ve volnoběhu, je hodnota úhlu statické chyby nulová.
Protože rychlost procesů je nepřímo úměrná odporu řídících vinutí, jsou pro urychlení rotace rotoru použity odpory. Jsou zapojeny v sérii do obvodu vinutí řídicího statoru. Vyhodnoťte účinnost práce na hlavním ukazateli - hodnotu vstupního výkonu.