
- Co je to kmitočtový převod
- Výběr motoru
- Získání magnetického pole
- Průmyslové frekvenční měniče
- Výhody použití frekvenčních měničů
- Regulace vektoru a frekvence
- Technická implementace měniče
- Princip regulace rychlosti
 Poměrně často musí mnoho šunek nebo jen podnikatelů ovládat rychlost třífázového motoru. Nemá smysl používat k tomu banální regulátor výkonu, protože je postaven na principu změny napětí, a přesto, jak víte, střídavé motory nechtějí být regulovány tímto způsobem, dokonce ani jednofázové.
Poměrně často musí mnoho šunek nebo jen podnikatelů ovládat rychlost třífázového motoru. Nemá smysl používat k tomu banální regulátor výkonu, protože je postaven na principu změny napětí, a přesto, jak víte, střídavé motory nechtějí být regulovány tímto způsobem, dokonce ani jednofázové.
Otáčky se samozřejmě změní, ale pouze v malém a téměř nepostřehnutelném limitu, po kterém, jakmile je dosaženo dolního prahu a když je 220 V při 150 V, otáčky se úplně zastaví. Pokud hřídel potřebuje také přijímat normální okamžik, například při regulaci rychlosti dopravníku nebo latě, podle toho, k čemu je připojen, je vhodný pouze měnič kmitočtu.
Co je to kmitočtový převod
 Pod pojmem konverze kmitočtu a poté frekvenčního převaděče bychom měli rozumět celému systému, který něco dělá. Konkrétně převádí frekvenci napájecího vinutí asynchronního napěťového motoru. To znamená, že soustřeďujeme vaši pozornost na skutečnost, že to není napětí, které se zde mění, ale jeho frekvence. V tomto regulačním režimu je moment na hřídeli motoru zachován při změně otáček.
Pod pojmem konverze kmitočtu a poté frekvenčního převaděče bychom měli rozumět celému systému, který něco dělá. Konkrétně převádí frekvenci napájecího vinutí asynchronního napěťového motoru. To znamená, že soustřeďujeme vaši pozornost na skutečnost, že to není napětí, které se zde mění, ale jeho frekvence. V tomto regulačním režimu je moment na hřídeli motoru zachován při změně otáček.
Chcete-li však vytvořit měnič kmitočtu vlastními rukama, musíte si pamatovat konstrukci a možné vlastnosti provozu asynchronních motorů. Kromě toho, při rozhodování o konkrétní výrobě takového zařízení, je prvním krokem nalezení motoru, který je vhodný pro parametry, který bude zvládat práci, která mu byla přidělena jako součást hotového komplexu.
Výběr motoru
Chcete-li navrhnout domácí chastotnik, měli byste si nejprve zapamatovat, co je asynchronní motor a jak to funguje. Nesynchronní motor nebo DPT je mechanické zařízení sestávající ze statoru s vinutím pole a rotoru. Druhou složkou může být:
 zkratovaný, to znamená, že střední vodiče jsou na koncích spojeny kroužky a samy o sobě jsou silné a krátké, což je důvod, proč se design nazývá „veverková kola“;
zkratovaný, to znamená, že střední vodiče jsou na koncích spojeny kroužky a samy o sobě jsou silné a krátké, což je důvod, proč se design nazývá „veverková kola“;- fáze má rotor několik vinutí, která jsou připojena k posuvným kroužkům použitým k odstranění napětí v generátorovém režimu.
Princip činnosti motoru je velmi jednoduchý a spočívá v vlivu rotujícího magnetického pole vytvořeného ve statoru na rotor veverkové klece, ve kterém se vyskytuje emf. Z tohoto důvodu začne proudit proud v rotoru, což vede ke vzniku sil interagujících s magnetickým polem statoru. V tomto případě jsou rychlost rotoru a magnetické pole nerovnoměrné, a proto se jedná o asynchronní motor.
Je rozumné předpokládat, že pokud změníte frekvenci napětí dodávajícího stator, změní se rychlost rotoru. Ve skutečnosti tedy všechny vážné společnosti používají k řízení takových motorů přesně frekvenční měniče. Při navrhování obvodu měniče kmitočtu pro elektromotor vlastními rukama byste měli zvážit typ motoru a všechny jeho vlastnosti. Zejména výkon, počet pólů a maximální rychlost otáčení. Připravená schémata si můžete stáhnout z online časopisu „Radiocot“ . Je jich mnoho .
Získání magnetického pole
 Pro získání třífázového rotujícího magnetického pole je nutné nechat proud přes cívku na statoru při požadované frekvenci, která bude určena vzorcem: iA = I m sinωt. V důsledku působení tohoto proudu začne MDS FA působit podél osy zatáčky. Protože zatáčky ve statoru se střídají ve fázích, zvlnění bude mít stejný charakter a vytvoří společnou pulzující sílu F, která je konstantní. Je definován jako kořen mocnin na druhou mocninu ve dvou zatáčkách posunutých vůči sobě navzájem v úhlu 90 °.
Pro získání třífázového rotujícího magnetického pole je nutné nechat proud přes cívku na statoru při požadované frekvenci, která bude určena vzorcem: iA = I m sinωt. V důsledku působení tohoto proudu začne MDS FA působit podél osy zatáčky. Protože zatáčky ve statoru se střídají ve fázích, zvlnění bude mít stejný charakter a vytvoří společnou pulzující sílu F, která je konstantní. Je definován jako kořen mocnin na druhou mocninu ve dvou zatáčkách posunutých vůči sobě navzájem v úhlu 90 °.
V důsledku toho dochází k rotaci pole s úhlovou rychlostí, vyjádřenou vzorcem pro každou zatáčku zvlášť: ω = 2π f 1. Pro výpočet rychlosti pole v celém stroji je však nutné vzít v úvahu celkový počet párů pólů vyjádřený symbolem p. A pak se rychlost pole bude rovnat: ω 0 = 2π f 1 / p. Podle toho je možné vypočítat rychlost vyjádřenou v rpm: n0 = 60 f 1 / p.
Kromě těchto dat je třeba mít na paměti, že se charakteristiky budou lišit od režimu volnoběhu, tj. Při ω = ω 0, a při zatížení, když ω ≠ ω 0. A také by bylo užitečné si vzpomenout, že při zatížení taková věc jako skluz, který se objevuje v důsledku zpoždění ω od ω 0. A je vyjádřen jako: s = (ω 0 - ω) / ω 0. To naznačuje, že při sestavování ACS se zvýšením této hodnoty je nutné automaticky změnit frekvenci napětí ve vinutí pro zajištění stability rychlosti při různých zatíženích .
Průmyslové frekvenční měniče
Všechny průmyslové chastotníky poskytují různé principy řízení rychlosti a momentu na hřídeli indukčních motorů změnou nejen frekvence, ale také fázového posunu, doby náběhu regulačních impulzů, dynamického brzdění a mnoha dalších parametrů. To vše se provádí automaticky bez další účasti zvnějšku. Průmyslový obvod měniče kmitočtu pro třífázový motor se proto skládá z následujících součástí:
 Centrální procesor, který funguje jako shaper hlavních a řídících impulsů.
Centrální procesor, který funguje jako shaper hlavních a řídících impulsů.- Napájecí jednotka: usměrňovač a současně řídicí jednotka, postavená na modulech IGBT.
- Jednotka pro vstup a výstup dat nebo pouze rozhraní pro interakci s uživatelem.
- Převodník sběrnice pro práci se systémem řízení programu.
Třífázový motor může být vybaven senzorem, pak je vyžadována zpětná vazba. Senzor může být optický, indukční nebo magnetický. U motorů s vysokými otáčkami se rychlost vypočítává programově na základě charakteristik.
Výhody použití frekvenčních měničů
Není to k ničemu, že lidé začali aktivně používat frekvenční měniče ve všech typech podniků a dokonce i v každodenním životě, protože jsou mnohem ekonomičtější než sběratelské motory a mohou pracovat v podmínkách, ve kterých se kartáčový motor rychle rozpadá. Kromě toho všechno použití frekvenčního měniče umožnilo nahradit mechanické variátory pohonnými systémy, což výrazně zjednodušilo konstrukci zařízení. A vzhledem k tomu, že DPT prakticky nevyžaduje opravu během provozu, je použití střídače jednoduše ideálním řešením.
Mělo by však být zřejmé, že existují regulační limity, při nichž se také změní princip řízení indukčního motoru:
- Při regulaci rychlosti v rozsahu 16: 1 nebo méně je nutné použít střídač pracující na volt - frekvenční odezvu.
- Pro regulaci v rozsahu 50: 1 je nutné použít vektorové bezsenzorové řízení.
- Ve velkém rozsahu by měla být zpětná vazba používána pomocí senzorů nebo regulátoru pid integrovaných v měniči.
V každém případě, je-li plánováno použití motoru v náročných provozních podmínkách, což se obvykle stává, je lepší použít vektorové řízení.
Regulace vektoru a frekvence
 K vybudování vysoce kvalitního samohybného dělového systému s asynchronním řízením motoru je nutné dobře rozumět pojmům, konkrétně vektorové regulaci nebo regulaci frekvence.
K vybudování vysoce kvalitního samohybného dělového systému s asynchronním řízením motoru je nutné dobře rozumět pojmům, konkrétně vektorové regulaci nebo regulaci frekvence.
Frekvenční princip se používá v systémech, kde není třeba přísně kontrolovat rychlost a tok vytvářený motorem bez významného zatížení je důležitý. Pokud je však nutné zajistit vysoký točivý moment a dobrou trakci od prvního otočení, mělo by se použít vektorové řízení.
Vektorové samohybné děla se používají také ve sledovacích systémech s nízkými rychlostmi posuvu. Například v podavačích stolů nebo podpěrách vřetena. Zde je nejen nutné překonat setrvačnost lože, ale také poskytnout potřebné úsilí při obrábění součásti.
Při navrhování chastotniku pro třífázový elektromotor vlastníma rukama je nutné vzít v úvahu typ zátěže, protože na tom bude záviset i charakteristika ovládacích spínačů výkonu, aby bylo dosaženo požadovaného výkonu s minimálními ztrátami.
Technická implementace měniče
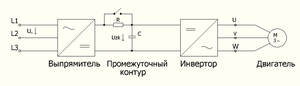
Takže se dostáváme ke konstrukci blokového diagramu indukčního motoru. A okamžitě byste se měli ujistit, že téměř všichni výrobci tohoto typu převodníků používají stejný obvodový obvod, jaký můžete použít pro návrh vlastního převodníku. A skládá se z následujících složek:
 Nekontrolovaný usměrňovač třífázové 380 V nebo jednofázové 220 V síťové napětí.
Nekontrolovaný usměrňovač třífázové 380 V nebo jednofázové 220 V síťové napětí.- Stejnosměrná sběrnice s vestavěným LC - filtrem, sestávající ze sady kondenzátorů, které zajišťují její stabilní náboj a eliminují zvlnění během přepětí v síti.
- Napěťový střídač, který převádí konstantní mezilehlé napětí na střídavé napětí požadované frekvence. Je vybaven PWM pro kontrolu kvality.
- Asynchronní elektrický motor, který je řízen.
Je třeba říci, že výrobci již dlouho šli směrem k vytvoření ideálního PWM, s nímž by bylo možné stabilně řídit motor. A teprve s příchodem IGBT modulů to bylo možné. Proto pro sestavení vlastního převodníku doporučujeme používat klíče s napětím alespoň 1200 V, přičemž je třeba brát v úvahu možné zvlnění sítě a s dobrým proudovým rozpětím. Na trhu je celkem možné najít tranzistory a moduly do 100 a více A.
Zjednodušený obvod převaděče bloků bude vypadat takto:
 Usměrňovač, jeho připojení se provádí podle principu jednofázového nebo dvoufázového můstkového obvodu. Je navržen pro převod střídavého napětí na stejnosměrný proud, vhodný pro další převod kmitočtu z 0 Hz na síťovou frekvenci. Mezilehlý obvod se podmíněně skládá ze dvou bloků:
Usměrňovač, jeho připojení se provádí podle principu jednofázového nebo dvoufázového můstkového obvodu. Je navržen pro převod střídavého napětí na stejnosměrný proud, vhodný pro další převod kmitočtu z 0 Hz na síťovou frekvenci. Mezilehlý obvod se podmíněně skládá ze dvou bloků:- Zařízení pro plynulé nabíjení sběrnice, aby nedošlo k poškození vedení pro vedení proudu při nabíjení kondenzátorů. Říká se tomu odolnost předřadníku.
- Blok kondenzátorů je filtr.
Vypočítané napětí meziobvodu je ~ 2 krát větší než U N. Po dosažení požadované konstantní úrovně napětí na sběrnici je odpor přemostěn kontaktním párem. Poslední blok v obvodu je střídač. Toto je konečný ovladač výstupních impulsů, které jsou potom přiváděny do motoru a zajišťují jeho otáčení při dané rychlosti.
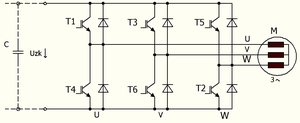
Obecná struktura výkonového modulu je znázorněna na následujícím obrázku:
 Při stavbě střídače se používají tranzistory s vysokým proudem, které pracují v čistě spínacím režimu. Přitom jsou velmi horké, takže jsou instalovány na velkých radiátorech s velkou oblastí odvádění tepla.
Při stavbě střídače se používají tranzistory s vysokým proudem, které pracují v čistě spínacím režimu. Přitom jsou velmi horké, takže jsou instalovány na velkých radiátorech s velkou oblastí odvádění tepla.
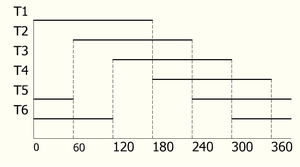
Chcete-li navrhnout řídicí obvod střídače, musíte si jasně představit vadu kláves. Chcete-li to provést, věnujte pozornost níže uvedenému obrázku:
Zobrazuje časové intervaly pro každý z klíčů nainstalovaných v tomto pořadí, jak je znázorněno na předchozím obrázku. To znamená, že ve fázi U fungují tranzistory T1 a T4, ve fázi V - T3 a T6 atd. Pro každé motorové vinutí hromada IGBT. Při konstrukci střídače pro nízkoenergetické motory s nízkými proudy můžete použít jednoduché bipolární nebo polní tranzistory.
Časový diagram ukazuje, že v prvním okamžiku se tranzistory T1, T5 a T6 otevřou. Tranzistor T1 a T6 je dále otevřený, zatímco T5 se uzavře a T2 se otevře a tak dále. Tento diagram zcela opakuje napěťový diagram v 3-fázové síti, ale pouze impulsy mají obdélníkový tvar a mají frekvenci nastavenou ovladačem.
Výsledkem je druh cyklického přepínání tranzistorů, zatímco proud ve fázích je vůči sobě posunut o 120 °. A pro získání řídicího napětí, sestávajícího z mnoha impulsů, ve formě sinusového signálu s minimálním počtem harmonických, použijte poměr tranzistorů zapnutí a vypnutí.
Aby se minimalizovaly ztráty v motoru, ke kterým obvykle dochází během pokusů o regulaci snížením napětí napříč vinutími motoru, uchylují se ke zvýšení frekvence.
Princip regulace rychlosti
Pro změnu rychlosti otáčení hřídele motoru je nutné změnit frekvenci f 1, ale mělo by se to provádět opatrně. Koneckonců je nutné udržovat magnetizační proud nezměněný. Pro udržení této rovnováhy musí být U 1 úměrné f 1, ale pokud je váha narušena, magnetizační proud se sníží nebo zvýší. V souladu s tím bude pole oslabeno nebo přesyceno. Aby se to zajistilo, je u / f charakteristika volena lineárně, dokud není dosaženo úhlové frekvence. Dochází k němu, když napětí na vinutí stoupne na maximum.