
- Rozdíl a druhy krokových motorů
- Návrh a princip fungování
- Metody řízení fází
- Metody řízení krokového motoru
- Režim řízení Microstepping
 Krokový motor je elektromechanické zařízení, které převádí elektrické signály na diskrétní úhlové posunutí hřídele. Použití krokových motorů umožňuje pracovním orgánům strojů provádět přísně měřené pohyby s fixováním jejich polohy na konci pohybu.
Krokový motor je elektromechanické zařízení, které převádí elektrické signály na diskrétní úhlové posunutí hřídele. Použití krokových motorů umožňuje pracovním orgánům strojů provádět přísně měřené pohyby s fixováním jejich polohy na konci pohybu.
Používají se na CNC strojích, robotice, kde jsou vyžadovány diskrétní pohyby, fixace polohy a nízká rychlost.
Rozdíl a druhy krokových motorů
Princip činnosti jsou blíže stejnosměrným motorům. Konstrukce elektrických motorů se neustále zlepšuje, aby se snížily náklady na pracovní sílu ve výrobě, zvýšila se účinnost a zvýšila se počet otáček. Oproti stejnosměrnému motoru nemají kartáče, kolektor a vinutí s menším počtem otáček.
Mezi první motory byl vytvořen miniaturní stroj hodinek a pojmenován po francouzském inženýrovi Mariusovi Lovetovi. Stator je rozpojen na okrajích nebo v oblasti rotoru má malé zúžení. Rotor o průměru 1, 5 mm, magnetický na bázi kobaltu. Jedno vinutí v jednom řádku o výkonu 1, 5 voltu. Úhel natočení je 90 stupňů.
Lávový motor se také používá v medicíně k čerpání různých kapalin a často se také používá v míchačkách a míchačkách.
V poslední době vývoj piezoelektrických motorů využívajících piezomagnetický efekt a využívající feromagnetické materiály v konstrukci. Lineární motory jsou vylepšeny, u kterých se hřídel neotáčí, ale provádí lineární pohyby. Pro přesné mechanické vybavení vyrábějí ruští výrobci motory se sériovým značením:
 DS.
DS.- DShR.
- DShG.
- DSL.
- SHD.
- DSE
Takové podniky jako ATOM, ZETEK, společnost Elektroprivod, Stepmotor, Vekson, NPO RIF, Saratov el. mechanický, VNIIEM Corporation, ZAO Uralelectromash, ARC Energoservice. Zahraniční společnosti jako Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron a další se zabývají výrobou motorových pohonů FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD. Řada vyráběných motorových pohonů je rozmanitá: podle velikosti, výkonu, se zabudovanou převodovkou a řídicí deskou.
Návrh a princip fungování
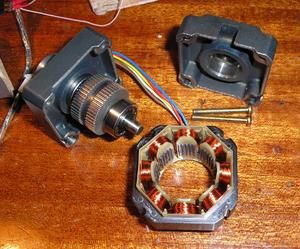
 Krokový motor se skládá ze statoru a rotujícího rotoru. Jádro statoru je vyrobeno ve formě sady plechů z elektrické oceli (lisované). Tím se snižují vířivé proudy a tím se zahřívá. Stator je obvodově rozdělen do 4, 6, 8 podélných drážek. Platí to a další. Na výstupcích mezi drážkami jsou vinutí ve formě cívek. Počet slotů odpovídá počtu pólů motoru. Čím více pólů, tím menší je úhel rotace rotoru, to znamená stoupání.
Krokový motor se skládá ze statoru a rotujícího rotoru. Jádro statoru je vyrobeno ve formě sady plechů z elektrické oceli (lisované). Tím se snižují vířivé proudy a tím se zahřívá. Stator je obvodově rozdělen do 4, 6, 8 podélných drážek. Platí to a další. Na výstupcích mezi drážkami jsou vinutí ve formě cívek. Počet slotů odpovídá počtu pólů motoru. Čím více pólů, tím menší je úhel rotace rotoru, to znamená stoupání.
Rotor sestává z jednoho nebo dvou permanentních magnetů s konci, jejichž kovové desky jsou upevněny zuby. V tomto případě jsou klady S a N permanentního magnetu rozděleny na n pólů, což odpovídá počtu zubů. Ovlivňuje také velikost kroku rotace. Podle konstrukce ШД se vyrábějí tři typy v závislosti na konstrukci rotoru:
- reaktivní;
- rotor s permanentním magnetem;
- hybridní.
 Reaktivní - rotor je vyroben z feromagnetického materiálu s podélnými drážkami, póly. Používá se jen zřídka, pouze pro jednoduché úkoly. Hlavně kvůli skutečnosti, že nemá blokovací moment. Hybridní - rotor je vyroben ze dvou polovin feromagnetického materiálu, s podélnými drážkami a mezi nimi je umístěn permanentní magnet. Drážky polovin vůči sobě jsou posunuty o malý úhel, aby se snížil sklon. Nejčastěji se používají.
Reaktivní - rotor je vyroben z feromagnetického materiálu s podélnými drážkami, póly. Používá se jen zřídka, pouze pro jednoduché úkoly. Hlavně kvůli skutečnosti, že nemá blokovací moment. Hybridní - rotor je vyroben ze dvou polovin feromagnetického materiálu, s podélnými drážkami a mezi nimi je umístěn permanentní magnet. Drážky polovin vůči sobě jsou posunuty o malý úhel, aby se snížil sklon. Nejčastěji se používají.
Když je na vinutí statoru přivedeno pulzní napětí, je generováno elektromagnetické pole. Interakce s nejbližším pólem permanentního magnetu vytváří točivý moment. Hřídel motoru se otáčí o určitý úhel. Úhel rotace závisí hlavně na počtu pólů rotoru.
Takový motor se bude jmenovat stepper. Vzhledem k jeho malé velikosti se model Em 422 Series WD používá v jehličkových tiskárnách.
Metody řízení fází
Řízení závisí hlavně na počtu pólů a konfiguraci vinutí statoru. SD se vyrábějí hlavně s následujícími vinutími:
- Dvě vinutí se 4 kolíky.
- Dvě vinutí se 6 dráty s průměrnou svorkou.
- Čtyři vinutí - 8 závěrů.
 Můžete ovládat dvě metody, použijte unipolární napětí - unipolární nebo bipolární - bipolární. Unipolární krokový motor má 4 póly a 2 vinutí. Ve čtyřfázové fázi je každé vinutí rozděleno na polovinu a nachází se na opačných pólech. Rotace se provádí střídavým přivedením napětí na vinutí. Se 6 přívody nebo 5, také 2 vinutími, ale s kohoutkem ze středu. Typicky jsou střední vodiče cívky spojeny dohromady se záporným drátem a pozitivní prostřednictvím spravovaných klíčů je přiváděna do vinutí.
Můžete ovládat dvě metody, použijte unipolární napětí - unipolární nebo bipolární - bipolární. Unipolární krokový motor má 4 póly a 2 vinutí. Ve čtyřfázové fázi je každé vinutí rozděleno na polovinu a nachází se na opačných pólech. Rotace se provádí střídavým přivedením napětí na vinutí. Se 6 přívody nebo 5, také 2 vinutími, ale s kohoutkem ze středu. Typicky jsou střední vodiče cívky spojeny dohromady se záporným drátem a pozitivní prostřednictvím spravovaných klíčů je přiváděna do vinutí.
Bipolární motory mají 4 vinutí, 2 pro každou fázi. K ovládání dochází, když se změní polarita vinutí. S tímto řízením je schéma zapojení krokového motoru komplikované, ale točivý moment je získáván více. Hlavními charakteristikami jsou napájecí napětí, spotřebovaný fázový proud, krok, výkon a velikost příruby. Sedadla jsou standardizována a označena například jako Nema 23. To odpovídá vzdálenosti mezi otvory pro montáž 57 mm.
Metody řízení krokového motoru
 Použití motorových pohonů v CNC strojích konkuruje pouze servopohonům, například v erozních strojích nebo tiskárnách je dokonce překonávají svými technickými schopnostmi, náklady a jednoduchými ovládacími schématy. Správa může být prováděna na digitálních mikroobvodech, specializovaných - A3977, na naprogramovaných PIC16, pomocí klíčů nebo ovladačů SMSD 1.5.
Použití motorových pohonů v CNC strojích konkuruje pouze servopohonům, například v erozních strojích nebo tiskárnách je dokonce překonávají svými technickými schopnostmi, náklady a jednoduchými ovládacími schématy. Správa může být prováděna na digitálních mikroobvodech, specializovaných - A3977, na naprogramovaných PIC16, pomocí klíčů nebo ovladačů SMSD 1.5.
Většina ovladačů je ovládána počítačem prostřednictvím portů RS-232, USB a LPT. Generují řídicí signály: krok, směr, rozlišení a poskytují krok rozdělený na ½ až 1/32 a pracují s programy: MACH3, KCam, DeskCNC, Turbocnc a dalšími. Připojte motor k ovladači kabelem, jak je popsáno. Po prostudování práce programu není těžké začít pracovat. Pro zahrnutí je použito napětí od 5 voltů do 48 voltů. Výjimkou jsou 220/110 V motory .
Režim řízení Microstepping
Hlavní provozní doba krokového motoru je v režimu krok za krokem nebo v polovině kroku a při spouštění a zastavování je vhodné použít precizní fixaci v mikrokrokovém režimu. Režim krok za krokem je určen návrhem a řízením pulsu. Během mikrokrokování jsou na vinutí přivedena sinusová napětí s požadovaným fázovým posunem.
Rotor je fixován v určitém poměru fází proudů ve vinutích. Výpočet rovnovážného bodu vzorcem x = S * pi / 2 * arctan a / b kde:
- a je okamžik vytvořený první fází ab je druhá fáze;
- x je rovnovážný bod rotoru nebo mikrokroku v radiánech;
- S je úhel kroku.
 Rovněž je nutné vzít v úvahu maximální frekvenci řídicího signálu, při které nedochází ke ztrátě nebo přidání dalšího kroku během provozu. Je to hlavní ukazatel přechodného režimu krokového motoru a je v charakteristikách označen jako frekvence odezvy motoru.
Rovněž je nutné vzít v úvahu maximální frekvenci řídicího signálu, při které nedochází ke ztrátě nebo přidání dalšího kroku během provozu. Je to hlavní ukazatel přechodného režimu krokového motoru a je v charakteristikách označen jako frekvence odezvy motoru.
Během provozu je nutné sledovat čistotu kolem měniče a zabránit vniknutí kovových třísek, je možné selhání motorového pohonu. Najděte způsob, jak chránit disk. Oprava je podobná jako oprava komutátorového motoru, vyžaduje přesnost.
Po demontáži vezměte a ofoukněte stator stlačeným vzduchem a otřete rotor hadrem. Zkontrolujte házivost ložiska.